
又名:在win11上安装wsl版ubuntu22.04使用issacgym进行强化学习的教程
硬件要求: 必须拥有 NVIDIA 独立显卡;内存 ≥ 16GB;磁盘剩余空间 ≥ 100GB。
一、 基础系统环境搭建
1.1 WSL2 安装与优化
以管理员权限打开 PowerShell,运行:
wsl --install。你可以参考这篇文章来进行安装:
《Windows11离线安装wsl2(适用于 Linux 的 Windows 子系统)和Ubuntu》
参考到第三部分“3、离线下载Ubuntu安装包”之前,就该继续往下看了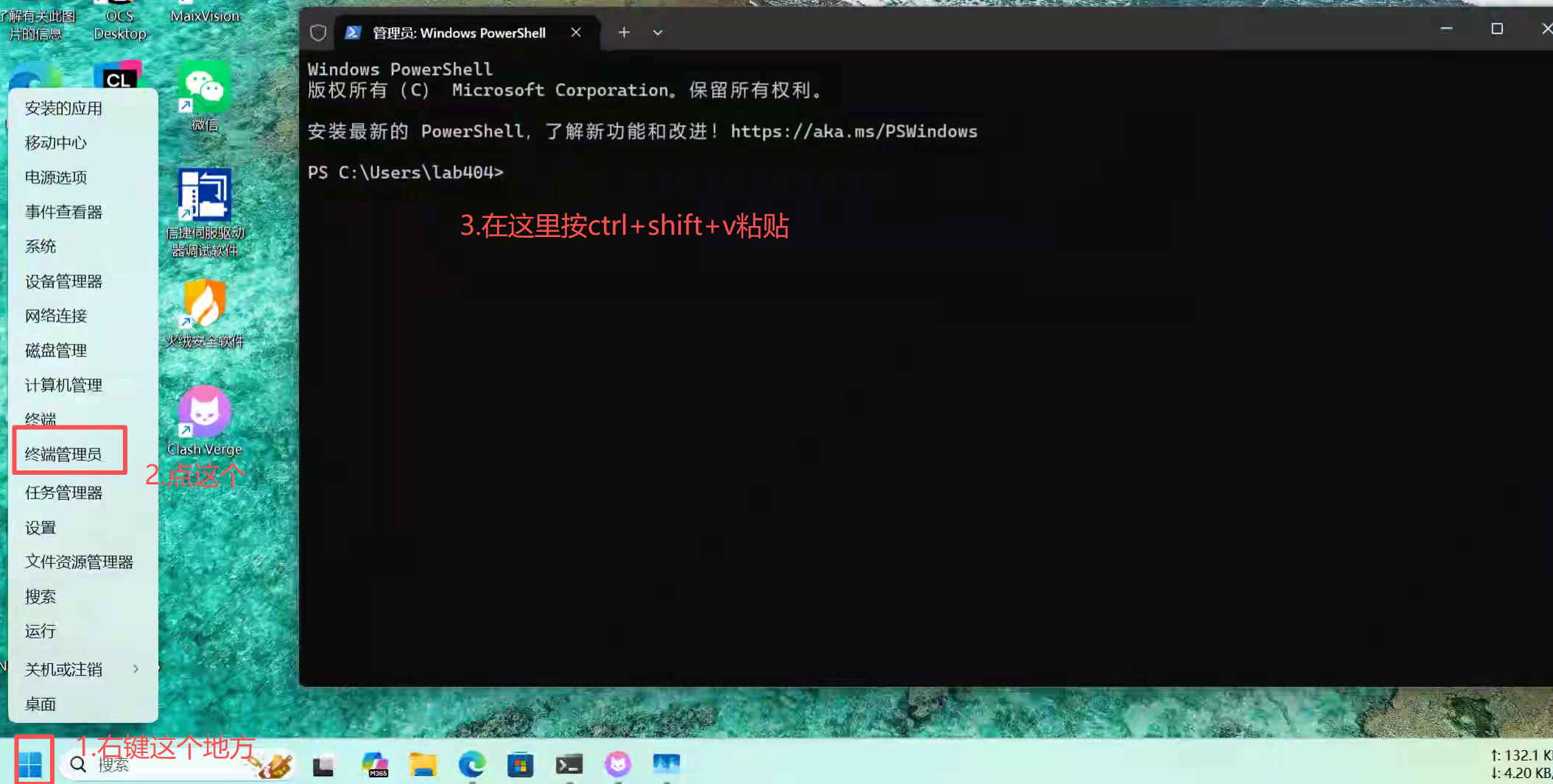
从实验室网盘下载 Ubuntu 22.04安装包(你也可以从微软商店直接搜索ubuntu 22.04安装,但应该没有实验室网盘快

换源优化:进入 Ubuntu 终端,执行:
!!请注意:终端窗口内按鼠标右键或者ctrl+shift+v可以粘贴的
bash <(curl -sSL https://linuxmirrors.cn/main.sh)按上下键选择,回车键确定。在实验室环境建议选择上交源,在宿舍或者家里建议选择清华源。后面问你http还是https可以不管,直接按回车就好。
1.2 基础依赖安装 (解决库缺失问题)
Isaac Gym 的 C++ 绑定库常因找不到 Python 动态库而报错,需执行以下修复 :
sudo apt update && sudo apt install libvulkan1 vulkan-tools mesa-utils unzip -y二、 开发环境配置
2.1 Anaconda 安装
下载并安装 Anaconda安装包
wget --user-agent="Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/143.0.0.0 Safari/537.36 Edg/143.0.0.0" https://mirrors.tuna.tsinghua.edu.cn/anaconda/archive/Anaconda3-2025.12-1-Linux-x86_64.sh bash ./Anaconda3-2025.12-1-Linux-x86_64.sh会有让你输yes/no的地方,两次都输入yes然后回车
source ~/.bashrc创建虚拟环境:
conda create -n pi_env python=3.8 -y conda activate pi_env
2.2 显卡驱动与 PyTorch 配置
确认显卡状态:在终端输入
nvidia-smi。若显示显卡信息,说明 WSL2 已成功挂载驱动。nvidia-smi
配置anaconda镜像源和pip镜像源:
cat > ~/.condarc <<'EOF'
default_channels:
- https://mirror.sjtu.edu.cn/anaconda/pkgs/r
- https://mirror.sjtu.edu.cn/anaconda/pkgs/main
custom_channels:
conda-forge: https://mirror.sjtu.edu.cn/anaconda/cloud/
pytorch: https://mirror.sjtu.edu.cn/anaconda/cloud/
channels:
- defaults
EOF
pip config set global.index-url https://mirror.sjtu.edu.cn/pypi/web/simple安装 PyTorch:
conda install pytorch torchvision torchaudio pytorch-cuda=12.4 -c pytorch -c nvidia
conda install numpy=1.23
修复 libpython 链接
sudo cp ~/anaconda3/envs/pi_env/lib/libpython3.8.so.1.0 /usr/lib/x86_64-linux-gnu/
三、 Isaac Gym 仿真环境安装
3.1 获取与解压
将下载好的 IsaacGym_Preview_4_Package.tar.gz 放置在主目录下并解压 :
# 下载文件
wget -O IsaacGym_Preview_4_Package.tar.gz "https://pan.404lab.doyo.icu/directlink/1/tools/仿真软件/IsaacGym/IsaacGym_Preview_4_Package.tar.gz"
# 解压文件
tar -xvzf IsaacGym_Preview_4_Package.tar.gz
cd isaacgym/python
pip install -e .3.2 WSL2 显卡加速配置
为让Vulkan 识别 GPU,安装 Mesa 稳定版驱动并设置变量:
sudo add-apt-repository ppa:kisak/turtle -y
sudo apt update && sudo apt upgrade -y配置GPU加速
cat << 'EOF' >> ~/.bashrc
# --- Isaac Gym & WSL2 配置 ---
#Vulkan 配置
export VK_ICD_FILENAMES=/usr/share/vulkan/icd.d/dzn_icd.x86_64.json
export LD_LIBRARY_PATH=/usr/lib/wsl/lib:$CONDA_PREFIX/lib:$LD_LIBRARY_PATH
EOF
source ~/.bashrc
#回到pi_env环境
conda activate pi_env3.3 验证安装(可略)
# 应该能看到 1080 个球掉落的画面
python examples/1080_balls_of_solitude.py四、 Mini Pi 强化学习项目实操
4.1 项目部署
解压项目并安装依赖:
#回根目录
cd
# 1. 下载压缩包并重命名为 pi_baseline.zip
wget -O pi_baseline.zip "https://pan.404lab.doyo.icu/directlink/1/硬件设备资料/高擎双足机器人Mini Pi /livelybot_pi_rl_baseline-release_v1.0.0.zip"
# 2. 安装解压工具(如果尚未安装)
sudo apt install unzip -y
# 3. 解压缩文件
unzip pi_baseline.zip
cd ~/livelybot_pi_rl_baseline-release_v1.0.0
pip install -e .4.2 策略训练 (PPO)
cd humanoid
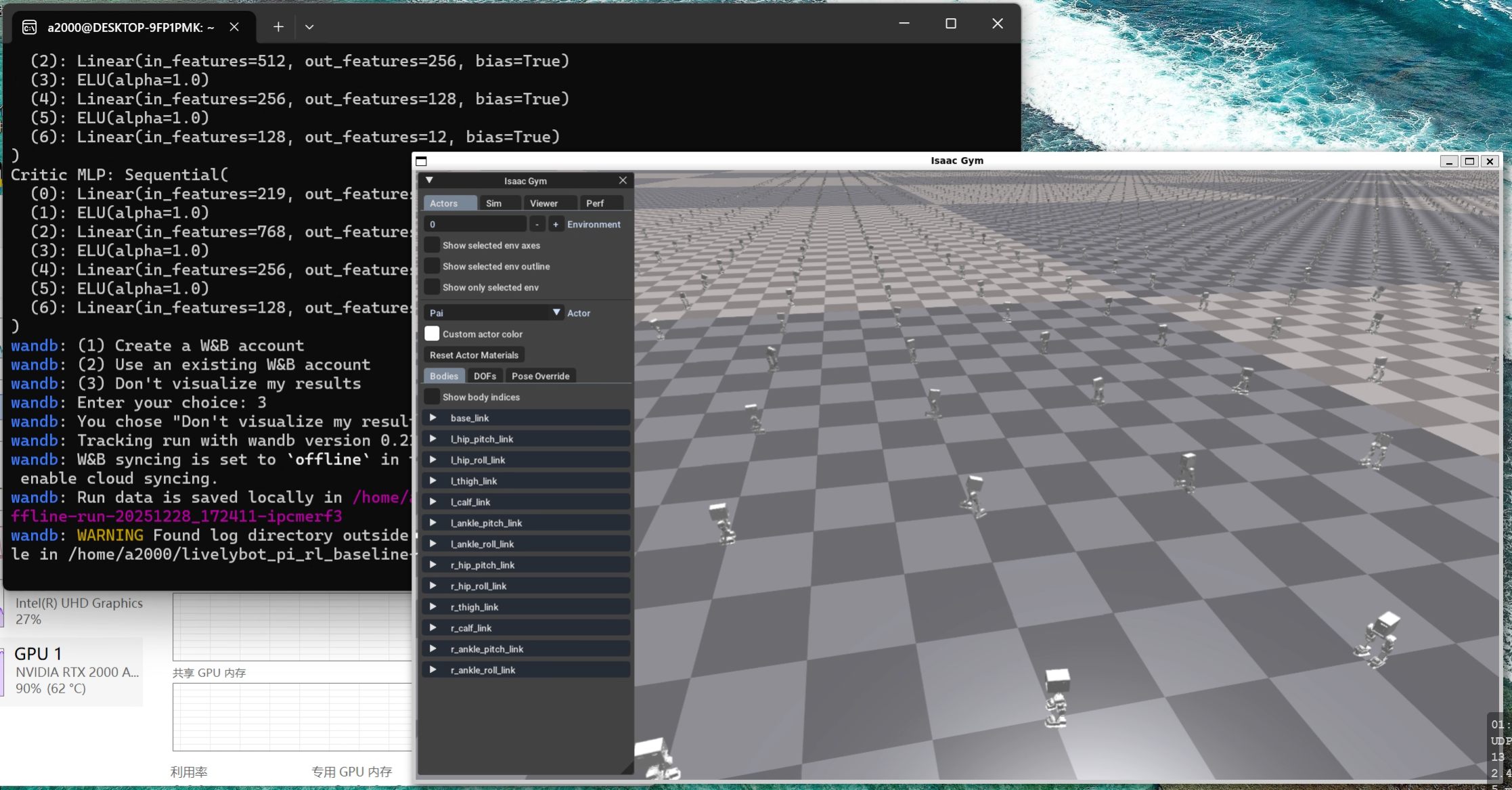
python scripts/train.py --task=pai_ppo --run_name v1 --num_envs 4
Wandb 提示:若无账号,输入 3 选择 offline 模式即可直接开始训练。
看见机器人开始站起来然后摔倒之后,就可以在终端按crtl+c停止了
五、重启后该怎么重新激活mini pi强化学习项目
sudo -i
conda activate pi_env
cd ~/livelybot_pi_rl_baseline-release_v1.0.0/humanoid启动策略训练
python scripts/train.py --task=pai_ppo --run_name v1 --headless --num_envs 4096六、开始配置你自己的策略
1.进入pi_env环境
sudo -i
conda activate pi_env
cd ~/livelybot_pi_rl_baseline-release_v1.0.0/humanoid2.修改pi_config.py和pi_env.py
(请使用ai自行询问如何修改编辑和传输到工作站上,这里只提供路径,不提供代码的注释。)
~/livelybot_pi_rl_baseline-release_v1.0.0/humanoid/envs/pai3.启动策略训练
#当前路径应为: ~/livelybot_pi_rl_baseline-release_v1.0.0/humanoid
# 使用 4096 个环境,并以“v1”为训练版本进行 PPO policy 训练
# 该命令将会开始机器人的训练任务.
python scripts/train.py --task=pai_ppo --run_name v1 --headless --num_envs 40964.评估训练好的policy
# 此命令将会加载“v1”policy以在其环境中进行性能评估。
# 此外,它还会自动导出适合部署的 JIT 模型。
python scripts/play.py --task=pai_ppo --run_name v15.在虚拟环境中查看
# 通过使用Mujoco实现sim2sim
python scripts/sim2sim.py --load_model /path/to/logs/Pai_ppo/exported/policies/policy_torch.pt